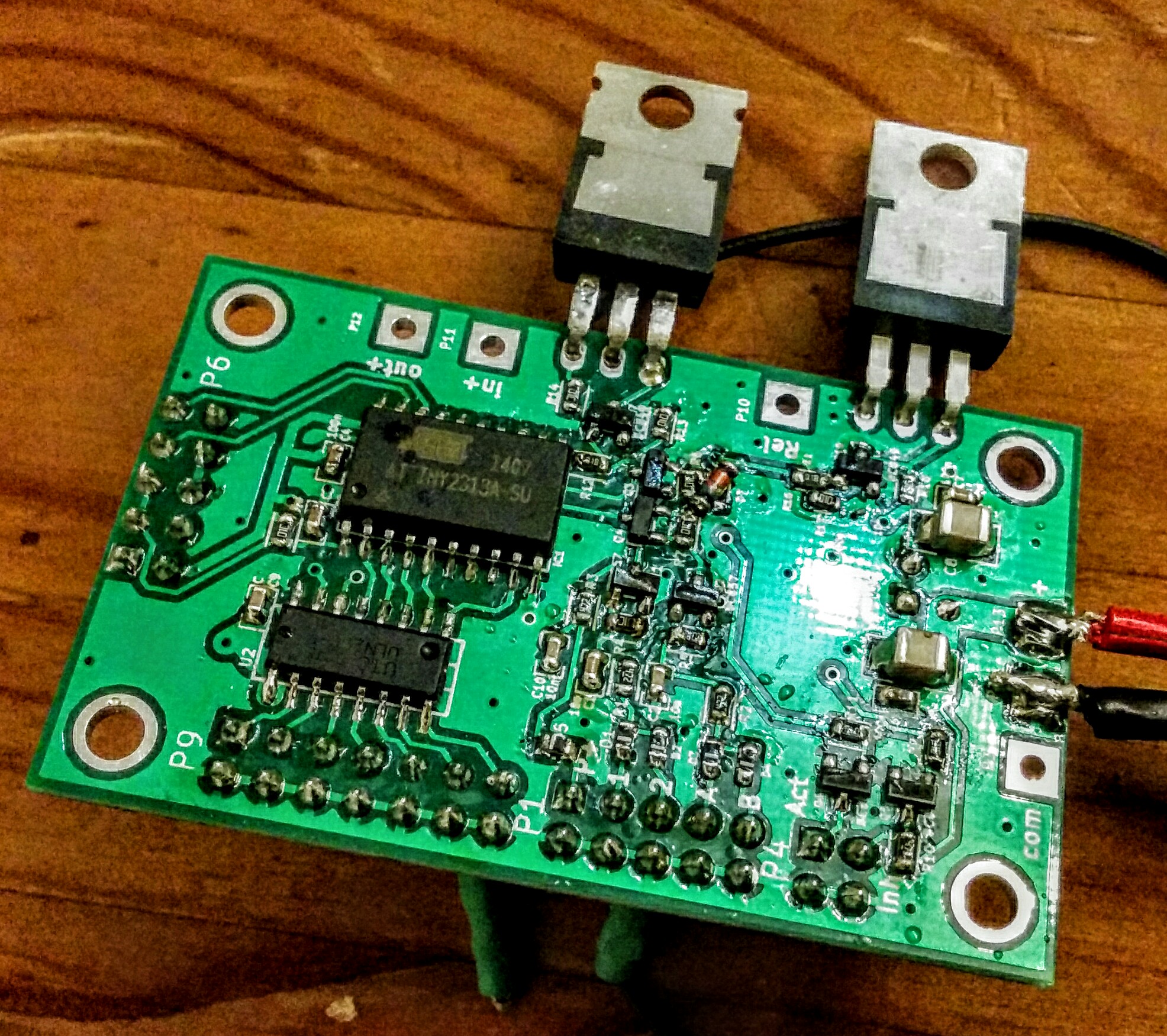
Attiny2313 + Uln2003 + highside FET switch for PA + lowside FET switch for RX-TX relais and a few bipolar Low Power stages on a two-layer board. The PTT input can be either high-side or low-side active. It also has lock input to connect several transverter to one antenna system. Via the driver IC a pulse relais and a fan can be controlled. There is also a Tx inhibit output that can be used with Yaesu tranceivers.
Schematic:
Attiny Sequencer Rev2 schematic
The circuit has two PTT inputs and two Error inputs (decoupled by diodes). A active high PTT input is available as well. There is a highside FET switch that can be used to drive a PA and a lowside FET switch that can be used for an RX/TX relais. The TX inhibit signal is available to drive the inhibit input of Yaesu transceivers. The active out is used to signal a sequencer in TX mode. This can be used to lock other sequencers via the error input. The ULN2003 driver is currently configured for another RX/TX relais, a fan which is running until 30s after releasing the PTT, another low active signal parallel to TX-inhibit (as PTT for TRX without TX inhibit) and output signals for a pulse relais (bi-stable RF relais). The serial interface (also used for ISP) is unused in the application. It might be possible to connect a temperature sensor for example.
The missing connection from Q4 to R7 is a print error.
The design was done with KiCad which is a open source PCB layout system. The code for the microcontroller was written in C. The 2k program memory are almost full now but one might be able to optimize. If you are interested in the design data let me know. I also have some spare PCB left over.
I wonder what else could be implemented with this PCB with the small program memory size. Feel free to give some ideas.